纽约大学低成本的Solo 8开源四足机器人原型来了
时间:2020-06-18 10:14:14
来源:cnBeta
尽管波士顿动力公司的 Spot 四足机器人已经上市,但它的售价也高达 7.5 万美元(53 万 RMB)。如果这远远超出了你的预算,那纽约大学与德国马克斯·普朗克智能系统研究所合作开发的 Solo 8,或许是一个不错的替代选择。据悉,Solo 8 旨在向研究人员提供低成本的开源机器人模型,希望大家能够分享数据而让彼此获益。
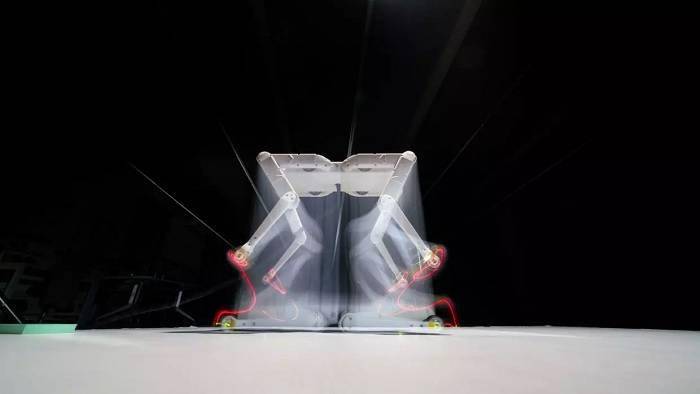
双重曝光处理的照片,展示了 Solo 8 的弹跳动作(图自:纽约大学)
同样的想法,已经在加州 Willow Garage 发布的 PR2 机器人项目上提出过。
除了支持多种步态和行走方向,Solo 8 的扭矩控制马达和驱动关节还允许跳跃、在遭到碰撞后恢复行走,以及保持方向、姿态和稳定性。
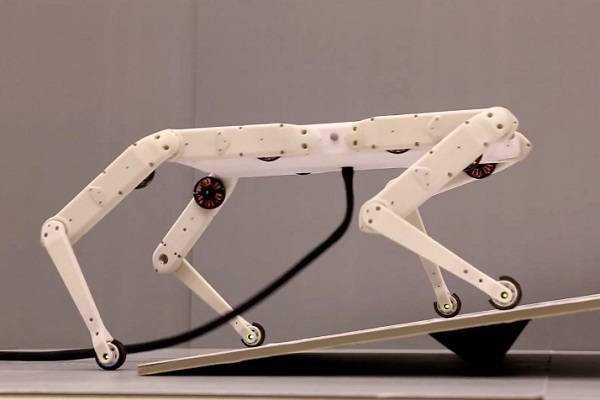
上图展示了具有 8 个活动关节的 Solo 8 机器人原型(另有 12 个活动关节的版本)
据悉,Solo 8 的重量仅略超 2 公斤(4.4 磅),具有很高的功率 / 重量比。设计师表示,其能够比其它大多数四足机器人都更轻松和安全地工作,预计售价不超过几千欧元。
马克斯普朗克 Dynamic Locomotion 团队负责人 Alexander Badri-Sprowitz 补充道:如果让一支研究团队从头开发这种机器人,几乎要浪费四年的时间。
20190823 Quadruped robot Solo trot(via)
此外 Solo 8 项目汇集了广泛的专业知识,全球任何实验室都可以在线上下载文件和打印零件,然后自行采购其它所需的零件。
只需通过几周的时间,每个研究人员都可轻松为其添加额外的功能,从而极大地加速全球机器人研究的进程。




热点*新闻



